mirror of
https://github.com/Anonym-tsk/smart-domofon.git
synced 2026-04-11 13:37:20 +03:00
Code moved
This commit is contained in:
69
native/README.md
Normal file
69
native/README.md
Normal file
@@ -0,0 +1,69 @@
|
||||
# Умный домофон на ESP8266
|
||||
[English](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/README_EN.md) | **Русский**
|
||||
|
||||
Устройство умеет открывать домофон при входящем вызове. Работает только с координатными домофонами. Проверено с домофонами Visit, Cyfral, Metakom, Altis.
|
||||
|
||||
---
|
||||
|
||||
Нравится проект? [Поддержи автора](http://yasobe.ru/na/esphome)! Купи ему немного :beers: или :coffee:!
|
||||
|
||||
[](http://yasobe.ru/na/esphome)
|
||||
|
||||
---
|
||||
|
||||
## Используемые компоненты
|
||||
* NodeMCU v3 x 1
|
||||
* Двойной релейный модуль x1
|
||||
* RGB светодиод x1
|
||||
* Тактовая кнопка x1
|
||||
* Оптрон x1
|
||||
* Несколько резисторов
|
||||
|
||||
Вместо NodeMCU можно всять почти любую ESP с достаточным количеством GPIO (например, Wemos D1 Mini). Кнопка и светодиод не обязательны.
|
||||
|
||||
## Пример компонентов
|
||||
1. [Оптопара PC817B](https://roboshop.spb.ru/PC817B)
|
||||
2. [Реле электромеханическое 2-канальное](https://roboshop.spb.ru/SRD-05VDC-SL-C-2-channel-rele)
|
||||
3. [NodeMCU V3](https://roboshop.spb.ru/NodeMCU-v3-dev-board)
|
||||
4. [RGB светодиод на плате](https://roboshop.spb.ru/RGB-led-module)
|
||||
5. [Кнопка тактовая 6х6х13мм](https://roboshop.spb.ru/KFC-A06-13H)
|
||||
6. [Провода "мама-мама" 10см](https://roboshop.spb.ru/female-to-female-line)
|
||||
7. [Провода "папа-мама" 10см](https://roboshop.spb.ru/male-to-female-line)
|
||||
8. [Резисторы](https://roboshop.spb.ru/600-resist-set)
|
||||
9. [microUSB кабель](https://roboshop.spb.ru/BS-410)
|
||||
|
||||
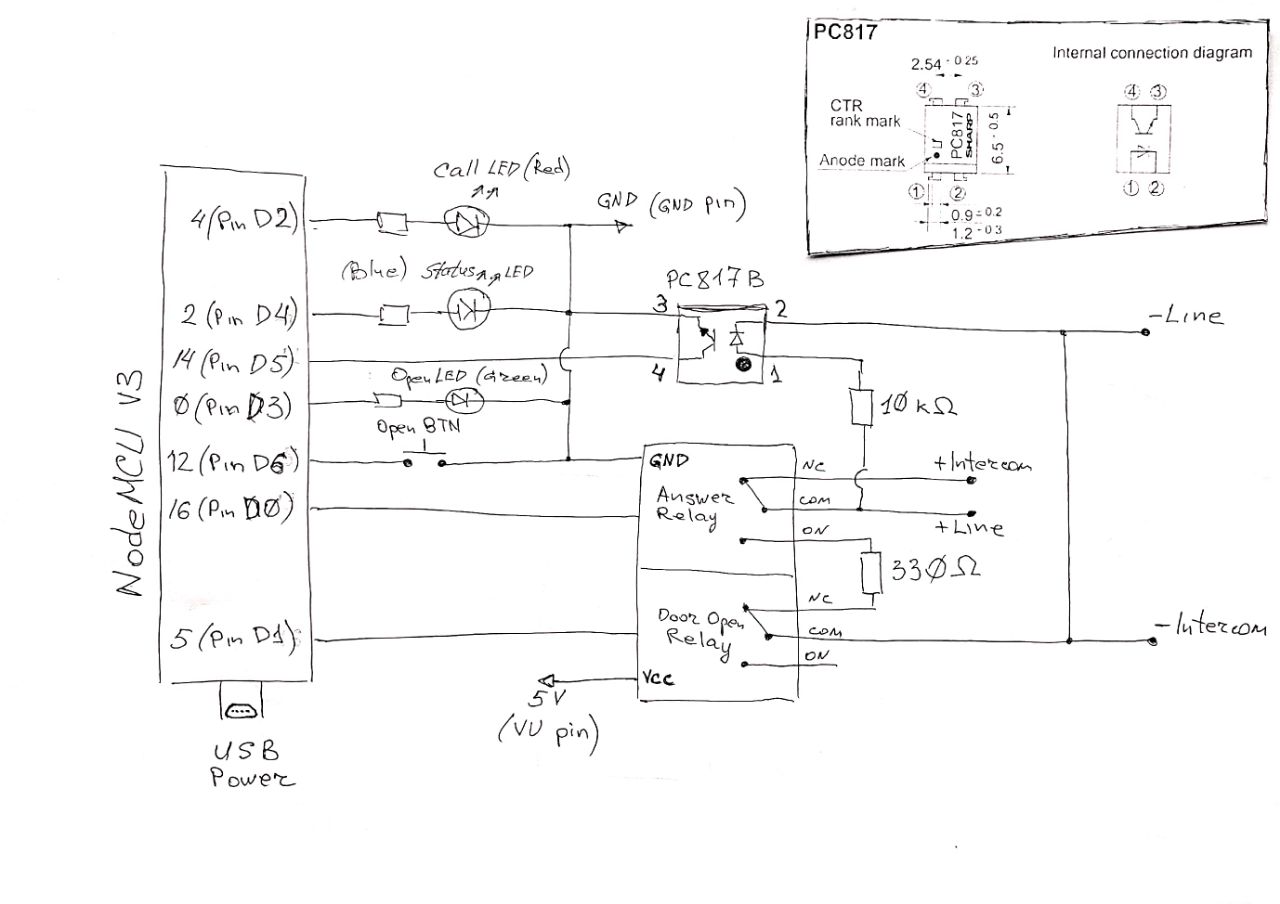
## Схема
|
||||
|
||||
|
||||
*За схему спасибо Oleg Yu*
|
||||
|
||||
### Эта версия прошивки больше не поддерживается. Пожалуйста, используйте [новую прошивку на базе ESPHome](https://github.com/Anonym-tsk/smart-domofon/blob/master/esphome/README.md).
|
||||
|
||||
## Конфигурация и прошивка
|
||||
1. Заполните настройки WiFi и MQTT в файле [software.h](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/src/config/software.h)
|
||||
2. Укажите `upload_port` в файле [platformio.ini](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/platformio.ini)
|
||||
3. Используйте [PlatformIO](https://platformio.org/platformio-ide) для компиляции и загрузки прошивки
|
||||
|
||||
## MQTT сообщения статуса (domofon/status)
|
||||
* 'R' - ready; отправляется после успешной загрузки или в ответ на сообщение 'P'
|
||||
* 'L' - last will message; отправляется когда устройство отключается от сети
|
||||
|
||||
## Входящие MQTT команды (domofon/in)
|
||||
* 'O' - открыть дверь
|
||||
* 'N' - отклонить вызов (дверь не откроется)
|
||||
* 'P' - ping (ответом будет статус 'R')
|
||||
|
||||
## Информационные MQTT сообщения (domofon/out)
|
||||
* 'C' - call; отправляется при входящем вызове
|
||||
* 'H' - hangup; отправляется когда входящий вызов завершается
|
||||
* 'B' - button; отправляется при открытии двери аппаратной кнопкой
|
||||
* 'J' - reJected; отправляется когда вызов отклоняется аппаратной кнопкой
|
||||
* 'S' - success; отправляется в ответ на команды 'O' и 'N'
|
||||
* 'F' - fail; отправляется в ответ на команды 'O' и 'N' (означает, что команда была получена, но в данный момент не было входящего звонка)
|
||||
|
||||
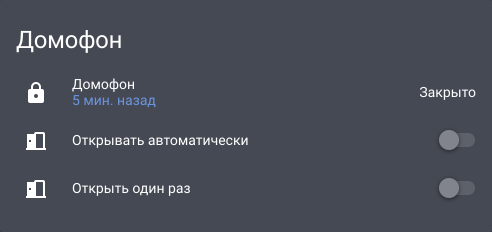
## Интеграция с Home Assistant
|
||||
|
||||
|
||||
[Конфигурация для Home Assistant с автоматизацией, сенсором и переключателями](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/homeassistant/domofon.yaml)
|
||||
|
||||
Положите этот файл в `/config/packages/domofon.yaml` и исправьте используемые сервисы в автоматизации.
|
||||
68
native/README_EN.md
Normal file
68
native/README_EN.md
Normal file
@@ -0,0 +1,68 @@
|
||||
# Smart intercom based on ESP8266
|
||||
**English** | [Русский](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/README.md)
|
||||
|
||||
This device can send "door open" command to intercom main unit after receiving of incoming call. It only works with coordinate line intercoms. Tested with Cyfral russian intercom.
|
||||
|
||||
---
|
||||
|
||||
Enjoy my work? [Help me out](http://yasobe.ru/na/esphome) for a couple of :beers: or a :coffee:!
|
||||
|
||||
[](http://yasobe.ru/na/esphome)
|
||||
|
||||
---
|
||||
|
||||
## Parts used
|
||||
* NodeMCU v3 x 1
|
||||
* Double relay module x1 (or two single relay modules)
|
||||
* LED x3 (or one RGB LED)
|
||||
* Button x2
|
||||
* Optocoupler x1
|
||||
* Some resistors
|
||||
|
||||
Instead of NodeMCU, you can buy almost any ESP with enough count of GPIO (for example, Wemos D1 Mini). Button and LED are optional.
|
||||
|
||||
## Example Parts
|
||||
1. [Оптопара PC817B](https://roboshop.spb.ru/PC817B)
|
||||
2. [Реле электромеханическое 2-канальное](https://roboshop.spb.ru/SRD-05VDC-SL-C-2-channel-rele)
|
||||
3. [NodeMCU V3](https://roboshop.spb.ru/NodeMCU-v3-dev-board)
|
||||
4. [RGB светодиод на плате](https://roboshop.spb.ru/RGB-led-module)
|
||||
5. [Кнопка тактовая 6х6х13мм KFC-A06-13H](https://roboshop.spb.ru/KFC-A06-13H)
|
||||
6. [Провода "мама-мама" 10см, 20 шт.](https://roboshop.spb.ru/female-to-female-line)
|
||||
7. [Провода "папа-мама" 10см, 20 шт.](https://roboshop.spb.ru/male-to-female-line)
|
||||
8. [Резисторы](https://roboshop.spb.ru/600-resist-set)
|
||||
9. [microUSB кабель](https://roboshop.spb.ru/BS-410)
|
||||
|
||||
## Scheme
|
||||

|
||||
*Thanks to Oleg Yu*
|
||||
|
||||
### This is old deprecated version. Please use new [ESPHome version](https://github.com/Anonym-tsk/smart-domofon/blob/master/esphome/README_EN.md)
|
||||
|
||||
## Configuration and build
|
||||
1. Fill in WiFi and MQTT credentials in [software.h](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/src/config/software.h)
|
||||
2. Fill in `upload_port` in [platformio.ini](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/platformio.ini)
|
||||
3. Use [PlatformIO](https://platformio.org/platformio-ide) to build and upload firmware
|
||||
|
||||
## Status MQTT messages (domofon/status)
|
||||
* 'R' - ready; sent after successfull boot-up or after receiving of 'P' message
|
||||
* 'L' - last will message; send when device goes offline
|
||||
|
||||
## Incoming MQTT messages (domofon/in)
|
||||
* 'O' - door open command
|
||||
* 'N' - call reject command (door will not open)
|
||||
* 'P' - ping command (answers with 'R')
|
||||
|
||||
## Outgoing MQTT messages (domofon/out)
|
||||
* 'C' - call; sent after detecting of incoming intercom call
|
||||
* 'H' - hangup; sent after detected incoming call finished
|
||||
* 'B' - button; sent when "door open" has been performed by green hw button press
|
||||
* 'J' - reJected; sent when incoming call has been rejected by red hw button press
|
||||
* 'S' - success; sent in response to 'O' or 'N' command
|
||||
* 'F' - fail; sent in response to 'O' or 'N' command (this means that 'O' or 'N' command has been received but no incoming call detected)
|
||||
|
||||
## Home Assistant integration
|
||||

|
||||
|
||||
[Full configuration with sensor, switches and automations](https://github.com/Anonym-tsk/smart-domofon/blob/master/native/homeassistant/domofon.yaml)
|
||||
|
||||
Put this file into `/config/packages/domofon.yaml` and correct notification service in automations.
|
||||
24
native/data/index.html
Normal file
24
native/data/index.html
Normal file
@@ -0,0 +1,24 @@
|
||||
<!DOCTYPE html>
|
||||
<html>
|
||||
<head>
|
||||
<title>Domofon</title>
|
||||
<meta charset="utf-8" />
|
||||
<meta name="viewport" content="width=device-width, initial-scale=1.0">
|
||||
<link rel="shortcut icon" href="data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAABAAAAAQCAYAAAAf8/9hAAAABmJLR0QA/wD/AP+gvaeTAAAACXBIWXMAAA3XAAAN1wFCKJt4AAAAB3RJTUUH4QkUEBQ2PpUhggAAAM5JREFUOMut0rFKQzEUANBDXwfpWnDoB9i5v1C/wJ9wcLCCu6sfIAodWwehLh3qIrjW1T8QB10FEV2kdcmDy4O25tlAICHJyc3N5Z+tCOMO5mjhsQ52iWXqp7mHh9jDLCBHOcAnngOywGEO8JZuLZGD3CfchtAf6iRwPwAvaNZBbgJyjUYusBtyscRVBWngAsfrkB4+AjLGTlob/LVO+hXkHU/oVurkZFMkr2Fz+cVd3KX5ZFNO2hitQM7KpxVrgG9McZ8qs0jIF87xYxvtFxFQQMNN792iAAAAAElFTkSuQmCC">
|
||||
<link rel="stylesheet" href="style.css"/>
|
||||
</head>
|
||||
|
||||
<body>
|
||||
<div class="content">
|
||||
<h2>Domofon</h2>
|
||||
|
||||
<textarea id="terminal" readonly></textarea>
|
||||
|
||||
<div class="controls">
|
||||
<input id="clear" type="button" value="Clear"/>
|
||||
<input id="restart" type="button" value="Restart"/>
|
||||
</div>
|
||||
</div>
|
||||
<script src="script.js"></script>
|
||||
</body>
|
||||
</html>
|
||||
63
native/data/script.js
Normal file
63
native/data/script.js
Normal file
@@ -0,0 +1,63 @@
|
||||
(function() {
|
||||
var terminal = document.getElementById('terminal'),
|
||||
clear = document.getElementById('clear'),
|
||||
restart = document.getElementById('restart'),
|
||||
ws = null,
|
||||
reconnectTimeout = null,
|
||||
prefix = '';
|
||||
|
||||
function _connect() {
|
||||
if (!ws || ws.readyState === WebSocket.CLOSED) {
|
||||
try {
|
||||
ws = new WebSocket('ws://' + window.location.hostname + '/ws');
|
||||
ws.onopen = _onOpen;
|
||||
ws.onmessage = _onMessage;
|
||||
ws.onclose = _onClose;
|
||||
} catch (e) {
|
||||
_onClose();
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
function _onOpen() {
|
||||
clearTimeout(reconnectTimeout);
|
||||
}
|
||||
|
||||
function _onClose(e) {
|
||||
var code = e && e.code || 1012;
|
||||
ws = null;
|
||||
if (code > 1000) {
|
||||
reconnectTimeout = setTimeout(_connect, 1000);
|
||||
}
|
||||
}
|
||||
|
||||
function _onMessage(message) {
|
||||
var data = message && message.data;
|
||||
if (data) {
|
||||
data = prefix + data;
|
||||
|
||||
if (data.endsWith("\n")) {
|
||||
prefix = "\n";
|
||||
data = data.substr(0, data.length - 1);
|
||||
} else {
|
||||
prefix = '';
|
||||
}
|
||||
|
||||
terminal.value += data;
|
||||
terminal.scrollTop = terminal.scrollHeight;
|
||||
}
|
||||
}
|
||||
|
||||
clear.addEventListener('click', function(e) {
|
||||
terminal.value = '';
|
||||
prefix = '';
|
||||
});
|
||||
|
||||
restart.addEventListener('click', function(e) {
|
||||
var xhr = new XMLHttpRequest();
|
||||
xhr.open('POST', '/restart', true);
|
||||
xhr.send(null);
|
||||
});
|
||||
|
||||
_connect();
|
||||
})();
|
||||
80
native/data/style.css
Normal file
80
native/data/style.css
Normal file
@@ -0,0 +1,80 @@
|
||||
html, body {
|
||||
margin: 0;
|
||||
padding: 0;
|
||||
width: 100%;
|
||||
height: 100%;
|
||||
font-family: sans-serif;
|
||||
}
|
||||
|
||||
.content {
|
||||
line-height: 1.6em;
|
||||
margin: 0 auto;
|
||||
padding: 30px 0 50px;
|
||||
max-width: 50pc;
|
||||
padding: 0 2em;
|
||||
overflow: hidden;
|
||||
}
|
||||
|
||||
h2 {
|
||||
font-size: 3em;
|
||||
font-weight: 300;
|
||||
margin: .5em 0 .3em;
|
||||
text-align: center;
|
||||
line-height: 1em;
|
||||
}
|
||||
|
||||
input, textarea {
|
||||
border-radius: 4px;
|
||||
padding: .5em .6em;
|
||||
box-sizing: border-box;
|
||||
outline: none;
|
||||
}
|
||||
|
||||
input {
|
||||
height: 36px;
|
||||
width: 20%;
|
||||
min-width: 140px;
|
||||
font-family: sans-serif;
|
||||
vertical-align: middle;
|
||||
line-height: normal;
|
||||
display: inline-block;
|
||||
white-space: nowrap;
|
||||
font-size: 100%;
|
||||
cursor: pointer;
|
||||
user-select: none;
|
||||
color: #fff;
|
||||
text-shadow: 0 1px 1px rgba(0,0,0,.2);
|
||||
text-align: center;
|
||||
}
|
||||
|
||||
input:active {
|
||||
box-shadow: 0 0 0 1px rgba(0,0,0,.15) inset, 0 0 6px rgba(0,0,0,.2) inset;
|
||||
}
|
||||
|
||||
.controls {
|
||||
margin: .5em 0 1em;
|
||||
}
|
||||
|
||||
#clear {
|
||||
background: #009a3e;
|
||||
}
|
||||
|
||||
#restart {
|
||||
float: right;
|
||||
background: #c01200;
|
||||
}
|
||||
|
||||
#terminal {
|
||||
display: block;
|
||||
width: 100%;
|
||||
background: #222;
|
||||
height: 25pc;
|
||||
max-height: 60vh;
|
||||
color: #c9ea7b;
|
||||
font-family: Courier New, monospace;
|
||||
font-size: 80%;
|
||||
line-height: 110%;
|
||||
resize: none;
|
||||
box-shadow: inset 0 1px 3px #ddd;
|
||||
border: 1px solid #ccc;
|
||||
}
|
||||
133
native/homeassistant/domofon.yaml
Normal file
133
native/homeassistant/domofon.yaml
Normal file
@@ -0,0 +1,133 @@
|
||||
# Domofon
|
||||
|
||||
# Automatically open door input
|
||||
input_boolean:
|
||||
domofon_auto_open:
|
||||
name: "Domofon auto open"
|
||||
icon: mdi:door-open
|
||||
domofon_auto_open_once:
|
||||
name: "Domofon auto open once"
|
||||
icon: mdi:door-open
|
||||
|
||||
# Incoming call sensor
|
||||
binary_sensor:
|
||||
- platform: mqtt
|
||||
name: "Domofon"
|
||||
state_topic: "domofon/out"
|
||||
availability_topic: "domofon/status"
|
||||
payload_on: "C"
|
||||
payload_off: "H"
|
||||
payload_available: "R"
|
||||
payload_not_available: "L"
|
||||
device_class: lock
|
||||
|
||||
automation:
|
||||
- alias: Domofon incoming call notification
|
||||
trigger:
|
||||
platform: state
|
||||
entity_id: binary_sensor.domofon
|
||||
to: 'on'
|
||||
condition:
|
||||
condition: and
|
||||
conditions:
|
||||
- condition: state
|
||||
entity_id: input_boolean.domofon_auto_open
|
||||
state: 'off'
|
||||
- condition: state
|
||||
entity_id: input_boolean.domofon_auto_open_once
|
||||
state: 'off'
|
||||
action:
|
||||
service: notify.telegram_all
|
||||
data:
|
||||
message: 'Звонок в домофон'
|
||||
data:
|
||||
inline_keyboard:
|
||||
- "Открыть:/domofon_open, Отклонить:/domofon_reject"
|
||||
|
||||
- alias: Domofon incoming call notification (auto open)
|
||||
trigger:
|
||||
platform: state
|
||||
entity_id: binary_sensor.domofon
|
||||
to: 'on'
|
||||
condition:
|
||||
condition: or
|
||||
conditions:
|
||||
- condition: state
|
||||
entity_id: input_boolean.domofon_auto_open
|
||||
state: 'on'
|
||||
- condition: state
|
||||
entity_id: input_boolean.domofon_auto_open_once
|
||||
state: 'on'
|
||||
action:
|
||||
- service: notify.telegram_all
|
||||
data:
|
||||
message: 'Звонок в домофон (откроется автоматически)'
|
||||
- service: input_boolean.turn_off
|
||||
data:
|
||||
entity_id: input_boolean.domofon_auto_open_once
|
||||
- service: mqtt.publish
|
||||
data:
|
||||
topic: "domofon/in"
|
||||
payload: "O"
|
||||
|
||||
- alias: Telegram /domofon_open callback
|
||||
trigger:
|
||||
platform: event
|
||||
event_type: telegram_callback
|
||||
event_data:
|
||||
data: '/domofon_open'
|
||||
action:
|
||||
- service: telegram_bot.answer_callback_query
|
||||
data_template:
|
||||
callback_query_id: "{{ trigger.event.data.id }}"
|
||||
message: "Открываю..."
|
||||
- service: mqtt.publish
|
||||
data:
|
||||
topic: "domofon/in"
|
||||
payload: "O"
|
||||
|
||||
- alias: Telegram /domofon_reject callback
|
||||
trigger:
|
||||
platform: event
|
||||
event_type: telegram_callback
|
||||
event_data:
|
||||
data: '/domofon_reject'
|
||||
action:
|
||||
- service: telegram_bot.answer_callback_query
|
||||
data_template:
|
||||
callback_query_id: "{{ trigger.event.data.id }}"
|
||||
message: "Отклоняю..."
|
||||
- service: mqtt.publish
|
||||
data:
|
||||
topic: "domofon/in"
|
||||
payload: "N"
|
||||
|
||||
- alias: Domofon success notification
|
||||
trigger:
|
||||
platform: mqtt
|
||||
topic: 'domofon/out'
|
||||
payload: 'S'
|
||||
action:
|
||||
service: notify.telegram_all
|
||||
data:
|
||||
message: "Выполнено"
|
||||
|
||||
- alias: Domofon failure notification
|
||||
trigger:
|
||||
platform: mqtt
|
||||
topic: 'domofon/out'
|
||||
payload: 'F'
|
||||
action:
|
||||
service: notify.telegram_all
|
||||
data:
|
||||
message: "Ошибка! Нет входящего звонка"
|
||||
|
||||
- alias: Domofon opened by button notification
|
||||
trigger:
|
||||
platform: mqtt
|
||||
topic: 'domofon/out'
|
||||
payload: 'B'
|
||||
action:
|
||||
service: notify.telegram_all
|
||||
data:
|
||||
message: "Домофон открыт кнопкой"
|
||||
BIN
native/homeassistant/ha.png
Normal file
BIN
native/homeassistant/ha.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 21 KiB |
33
native/platformio.ini
Normal file
33
native/platformio.ini
Normal file
@@ -0,0 +1,33 @@
|
||||
; PlatformIO Project Configuration File
|
||||
;
|
||||
; Build options: build flags, source filter
|
||||
; Upload options: custom upload port, speed and extra flags
|
||||
; Library options: dependencies, extra library storages
|
||||
; Advanced options: extra scripting
|
||||
;
|
||||
; Please visit documentation for the other options and examples
|
||||
; https://docs.platformio.org/page/projectconf.html
|
||||
|
||||
[platformio]
|
||||
env_default = nodemcuv2
|
||||
src_dir = src
|
||||
|
||||
[env:nodemcuv2]
|
||||
platform = espressif8266
|
||||
board = nodemcuv2
|
||||
framework = arduino
|
||||
|
||||
lib_deps =
|
||||
PubSubClient
|
||||
Bounce2
|
||||
ESP Async WebServer
|
||||
|
||||
targets = upload, uploadfs
|
||||
|
||||
upload_port =
|
||||
; upload_flags = --auth=domofon
|
||||
|
||||
; upload_port = /dev/cu.wchusbserial1430
|
||||
; upload_speed = 115200
|
||||
; monitor_port = /dev/cu.wchusbserial1430
|
||||
; monitor_speed = 115200
|
||||
BIN
native/scheme.jpeg
Normal file
BIN
native/scheme.jpeg
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 84 KiB |
17
native/src/config/hardware.h
Normal file
17
native/src/config/hardware.h
Normal file
@@ -0,0 +1,17 @@
|
||||
#ifndef HW_H_
|
||||
#define HW_H_
|
||||
|
||||
// Hardware configuration
|
||||
#define PIN_RELAY_ANSWER 16 //D0
|
||||
#define PIN_RELAY_DOOR_OPEN 5 //D1
|
||||
|
||||
#define PIN_LED_RED 4 //D2
|
||||
#define PIN_LED_GREEN 0 //D3
|
||||
#define PIN_LED_BLUE 2 //D4
|
||||
|
||||
#define PIN_CALL_DETECT 14 //D5
|
||||
|
||||
#define PIN_BUTTON_GREEN 12 //D6
|
||||
#define PIN_BUTTON_RED 13 //D7
|
||||
|
||||
#endif // HW_H_
|
||||
19
native/src/config/mqtt.h
Normal file
19
native/src/config/mqtt.h
Normal file
@@ -0,0 +1,19 @@
|
||||
#ifndef MQTT_H_
|
||||
#define MQTT_H_
|
||||
|
||||
// High level protocol messages
|
||||
#define MSG_STATUS_READY "R" // ready; sent after successfull boot-up or after receiving of 'P' message
|
||||
#define MSG_STATUS_LAST_WILL "L" // last will message; send when device goes offline
|
||||
|
||||
#define MSG_OUT_CALL "C" // call; sent after detecting of incoming intercom call
|
||||
#define MSG_OUT_HANGUP "H" // hangup; sent after detected incoming call finished
|
||||
#define MSG_OUT_OPENED_BY_BUTTON "B" // button; sent when "door open" has been performed by green hw button press
|
||||
#define MSG_OUT_REJECTED_BY_BUTTON "J" // reJected; sent when incoming call has been rejected by red hw button press
|
||||
#define MSG_OUT_SUCCESS "S" // success; sent in response to 'O' or 'N' command
|
||||
#define MSG_OUT_FAIL "F" // fail; sent in response to 'O' or 'N' command (this means that 'O' or 'N' command has been received but no incoming call detected)
|
||||
|
||||
#define MSG_IN_OPEN 'O' // door open command
|
||||
#define MSG_IN_REJECT 'N' // call reject command (door will not open)
|
||||
#define MSG_IN_PING 'P' // ping command (answers with 'R')
|
||||
|
||||
#endif // MQTT_H_
|
||||
25
native/src/config/software.h
Normal file
25
native/src/config/software.h
Normal file
@@ -0,0 +1,25 @@
|
||||
#ifndef SW_H_
|
||||
#define SW_H_
|
||||
|
||||
// Software configuration
|
||||
#define HOST_NAME "domofon"
|
||||
#define HOST_PASSWORD "domofon"
|
||||
#define OTA_PORT 8266
|
||||
#define WIFI_SSID ""
|
||||
#define WIFI_PASSWORD ""
|
||||
|
||||
#define MQTT_SERVER_ADDR ""
|
||||
#define MQTT_SERVER_PORT 1883
|
||||
#define MQTT_USER_NAME ""
|
||||
#define MQTT_USER_PASSWORD ""
|
||||
#define MQTT_CLIENT_ID "domofon"
|
||||
#define MQTT_TOPIC_IN "domofon/in"
|
||||
#define MQTT_TOPIC_OUT "domofon/out"
|
||||
#define MQTT_TOPIC_STATUS "domofon/status"
|
||||
|
||||
#define CALL_HANGUP_DETECT_DELAY 3000
|
||||
#define RELAY_ANSWER_ON_TIME 1500
|
||||
#define RELAY_OPEN_ON_TIME 600
|
||||
#define RELAY_AFTER_OPEN_ON_TIME 500
|
||||
|
||||
#endif // SW_H_
|
||||
12
native/src/debug.ino
Normal file
12
native/src/debug.ino
Normal file
@@ -0,0 +1,12 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
void DEBUG_LN(const char *text) {
|
||||
Serial.println(text);
|
||||
webSocket().printfAll("%s\n", text);
|
||||
}
|
||||
|
||||
template<typename... Args>
|
||||
void DEBUG_F(const char *format, Args... args) {
|
||||
Serial.printf(format, args...);
|
||||
webSocket().printfAll(format, args...);
|
||||
}
|
||||
146
native/src/domofon.ino
Normal file
146
native/src/domofon.ino
Normal file
@@ -0,0 +1,146 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
EState state = IDLE;
|
||||
EAction action = NO_ACTION;
|
||||
|
||||
Bounce debouncerBtnGreen = Bounce();
|
||||
Bounce debouncerBtnRed = Bounce();
|
||||
|
||||
unsigned long lastCallDetectedTime = 0;
|
||||
|
||||
void callAnswer() {
|
||||
DEBUG_LN("[HW] Call answer...");
|
||||
digitalWrite(PIN_RELAY_DOOR_OPEN, RELAY_OFF);
|
||||
digitalWrite(PIN_RELAY_ANSWER, RELAY_ON);
|
||||
DEBUG_LN("[HW] Done");
|
||||
}
|
||||
|
||||
void callHangUp() {
|
||||
DEBUG_LN("[HW] Hang up...");
|
||||
digitalWrite(PIN_RELAY_ANSWER, RELAY_OFF);
|
||||
digitalWrite(PIN_RELAY_DOOR_OPEN, RELAY_OFF);
|
||||
DEBUG_LN("[HW] Done");
|
||||
}
|
||||
|
||||
void doorOpen() {
|
||||
DEBUG_LN("[HW] Door open...");
|
||||
digitalWrite(PIN_RELAY_DOOR_OPEN, RELAY_ON);
|
||||
delay(RELAY_OPEN_ON_TIME);
|
||||
digitalWrite(PIN_RELAY_DOOR_OPEN, RELAY_OFF);
|
||||
DEBUG_LN("[HW] Done");
|
||||
}
|
||||
|
||||
void answerAndOpen() {
|
||||
callAnswer();
|
||||
delay(RELAY_ANSWER_ON_TIME);
|
||||
doorOpen();
|
||||
delay(RELAY_AFTER_OPEN_ON_TIME);
|
||||
callHangUp();
|
||||
}
|
||||
|
||||
void answerAndReject() {
|
||||
callAnswer();
|
||||
delay(RELAY_ANSWER_ON_TIME);
|
||||
callHangUp();
|
||||
}
|
||||
|
||||
void handleIdle(EState oldState) {
|
||||
if (oldState != IDLE) {
|
||||
mqttSendCommand(MSG_OUT_HANGUP);
|
||||
ledOff();
|
||||
DEBUG_LN("[HW] Current state: IDLE");
|
||||
}
|
||||
|
||||
if (action != NO_ACTION) {
|
||||
mqttSendCommand(MSG_OUT_FAIL);
|
||||
action = NO_ACTION;
|
||||
}
|
||||
|
||||
if (debouncerBtnGreen.fell()) {
|
||||
DEBUG_LN("[HW] Button click");
|
||||
ledBlink(PIN_LED_GREEN, 2);
|
||||
}
|
||||
}
|
||||
|
||||
void handleCall(EState oldState) {
|
||||
if (oldState != CALL) {
|
||||
action = NO_ACTION;
|
||||
mqttSendCommand(MSG_OUT_CALL);
|
||||
ledOn(PIN_LED_RED);
|
||||
DEBUG_LN("[HW] Current state: CALL");
|
||||
}
|
||||
|
||||
if (action == NO_ACTION) {
|
||||
if (debouncerBtnRed.fell()) {
|
||||
action = REJECT_BY_BUTTON;
|
||||
} else if (debouncerBtnGreen.fell()) {
|
||||
action = OPEN_BY_BUTTON;
|
||||
}
|
||||
}
|
||||
|
||||
switch (action) {
|
||||
case OPEN_BY_BUTTON:
|
||||
answerAndOpen();
|
||||
mqttSendCommand(MSG_OUT_OPENED_BY_BUTTON);
|
||||
break;
|
||||
|
||||
case REJECT_BY_BUTTON:
|
||||
answerAndReject();
|
||||
mqttSendCommand(MSG_OUT_REJECTED_BY_BUTTON);
|
||||
break;
|
||||
|
||||
case OPEN:
|
||||
answerAndOpen();
|
||||
mqttSendCommand(MSG_OUT_SUCCESS);
|
||||
break;
|
||||
|
||||
case REJECT:
|
||||
answerAndReject();
|
||||
mqttSendCommand(MSG_OUT_SUCCESS);
|
||||
break;
|
||||
|
||||
default:
|
||||
break;
|
||||
}
|
||||
|
||||
action = NO_ACTION;
|
||||
}
|
||||
|
||||
void setStateIdle() {
|
||||
state = IDLE;
|
||||
}
|
||||
|
||||
void setStateCall() {
|
||||
state = CALL;
|
||||
}
|
||||
|
||||
void domofonSetup() {
|
||||
debouncerBtnGreen.attach(PIN_BUTTON_GREEN);
|
||||
debouncerBtnGreen.interval(25);
|
||||
debouncerBtnRed.attach(PIN_BUTTON_RED);
|
||||
debouncerBtnRed.interval(25);
|
||||
}
|
||||
|
||||
void domofonLoop() {
|
||||
debouncerBtnGreen.update();
|
||||
debouncerBtnRed.update();
|
||||
|
||||
EState oldState = state;
|
||||
|
||||
if (digitalRead(PIN_CALL_DETECT) == LOW) {
|
||||
setStateCall();
|
||||
lastCallDetectedTime = millis();
|
||||
} else if (millis() - lastCallDetectedTime > CALL_HANGUP_DETECT_DELAY) {
|
||||
setStateIdle();
|
||||
}
|
||||
|
||||
switch (state) {
|
||||
case IDLE:
|
||||
handleIdle(oldState);
|
||||
break;
|
||||
|
||||
case CALL:
|
||||
handleCall(oldState);
|
||||
break;
|
||||
}
|
||||
}
|
||||
28
native/src/hardware.ino
Normal file
28
native/src/hardware.ino
Normal file
@@ -0,0 +1,28 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
Ticker _defer_restart;
|
||||
|
||||
void hardwareSetup() {
|
||||
pinMode(PIN_BUTTON_GREEN, INPUT_PULLUP);
|
||||
pinMode(PIN_BUTTON_RED, INPUT_PULLUP);
|
||||
pinMode(PIN_CALL_DETECT, INPUT_PULLUP);
|
||||
pinMode(PIN_LED_RED, OUTPUT);
|
||||
pinMode(PIN_LED_GREEN, OUTPUT);
|
||||
pinMode(PIN_LED_BLUE, OUTPUT);
|
||||
pinMode(PIN_RELAY_ANSWER, OUTPUT);
|
||||
pinMode(PIN_RELAY_DOOR_OPEN, OUTPUT);
|
||||
|
||||
digitalWrite(PIN_LED_RED, LED_OFF);
|
||||
digitalWrite(PIN_LED_GREEN, LED_OFF);
|
||||
digitalWrite(PIN_LED_BLUE, LED_OFF);
|
||||
digitalWrite(PIN_RELAY_ANSWER, RELAY_OFF);
|
||||
digitalWrite(PIN_RELAY_DOOR_OPEN, RELAY_OFF);
|
||||
}
|
||||
|
||||
void restart() {
|
||||
ESP.reset();
|
||||
}
|
||||
|
||||
void deferredRestart(unsigned long delay) {
|
||||
_defer_restart.once_ms(delay, restart);
|
||||
}
|
||||
13
native/src/inc/include.h
Normal file
13
native/src/inc/include.h
Normal file
@@ -0,0 +1,13 @@
|
||||
#include <Arduino.h>
|
||||
#include <ESP8266WiFi.h>
|
||||
#include <ArduinoOTA.h>
|
||||
#include <FS.h>
|
||||
#include <PubSubClient.h>
|
||||
#include <Bounce2.h>
|
||||
#include <ESPAsyncWebServer.h>
|
||||
#include <Ticker.h>
|
||||
|
||||
#include "../config/hardware.h"
|
||||
#include "../config/software.h"
|
||||
#include "../config/mqtt.h"
|
||||
#include "types.h"
|
||||
22
native/src/inc/types.h
Normal file
22
native/src/inc/types.h
Normal file
@@ -0,0 +1,22 @@
|
||||
#ifndef TYPES_H_
|
||||
#define TYPES_H_
|
||||
|
||||
#define LED_ON HIGH
|
||||
#define LED_OFF LOW
|
||||
#define RELAY_ON LOW
|
||||
#define RELAY_OFF HIGH
|
||||
|
||||
typedef enum {
|
||||
IDLE,
|
||||
CALL
|
||||
} EState;
|
||||
|
||||
typedef enum {
|
||||
NO_ACTION,
|
||||
OPEN,
|
||||
OPEN_BY_BUTTON,
|
||||
REJECT,
|
||||
REJECT_BY_BUTTON
|
||||
} EAction;
|
||||
|
||||
#endif // TYPES_H_
|
||||
21
native/src/led.ino
Normal file
21
native/src/led.ino
Normal file
@@ -0,0 +1,21 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
void ledBlink(int pin, int count) {
|
||||
for (int i = 0; i < count; i++) {
|
||||
digitalWrite(pin, LED_ON);
|
||||
delay(125);
|
||||
digitalWrite(pin, LED_OFF);
|
||||
delay(125);
|
||||
}
|
||||
}
|
||||
|
||||
void ledOff() {
|
||||
digitalWrite(PIN_LED_GREEN, LED_OFF);
|
||||
digitalWrite(PIN_LED_RED, LED_OFF);
|
||||
digitalWrite(PIN_LED_BLUE, LED_OFF);
|
||||
}
|
||||
|
||||
void ledOn(int pin) {
|
||||
ledOff();
|
||||
digitalWrite(pin, LED_ON);
|
||||
}
|
||||
20
native/src/main.ino
Normal file
20
native/src/main.ino
Normal file
@@ -0,0 +1,20 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
// Код частично заимствован и переделан
|
||||
// @see https://github.com/Metori/mqtt_domofon
|
||||
|
||||
void setup() {
|
||||
hardwareSetup();
|
||||
wifiSetup();
|
||||
otaSetup();
|
||||
mqttSetup();
|
||||
webServerSetup();
|
||||
domofonSetup();
|
||||
}
|
||||
|
||||
void loop() {
|
||||
wifiLoop();
|
||||
otaLoop();
|
||||
mqttLoop();
|
||||
domofonLoop();
|
||||
}
|
||||
89
native/src/mqtt.ino
Normal file
89
native/src/mqtt.ino
Normal file
@@ -0,0 +1,89 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
WiFiClient espClient;
|
||||
PubSubClient mqttClient(espClient);
|
||||
|
||||
void mqttSendCommand(const char *msg) {
|
||||
mqttClient.publish(MQTT_TOPIC_OUT, msg);
|
||||
DEBUG_F("[MQTT] Message sent: %s\n", msg);
|
||||
}
|
||||
|
||||
void mqttSendStatus(const char *msg) {
|
||||
mqttClient.publish(MQTT_TOPIC_STATUS, msg, true);
|
||||
DEBUG_F("[MQTT] Status sent: %s\n", msg);
|
||||
}
|
||||
|
||||
void onMqttMsgReceived(char* topic, byte* payload, unsigned int len) {
|
||||
if (len != 1) {
|
||||
char* command = (char*)malloc(len + 2);
|
||||
memcpy(command, payload, len);
|
||||
command[len] = '\0';
|
||||
|
||||
DEBUG_F("[MQTT] Message received [%u]: %s\n", len, command);
|
||||
return;
|
||||
}
|
||||
|
||||
char cmd = (char)payload[0];
|
||||
DEBUG_F("[MQTT] Command received: %c\n", cmd);
|
||||
|
||||
switch (cmd) {
|
||||
case MSG_IN_OPEN:
|
||||
action = OPEN;
|
||||
break;
|
||||
|
||||
case MSG_IN_REJECT:
|
||||
action = REJECT;
|
||||
break;
|
||||
|
||||
case MSG_IN_PING:
|
||||
mqttSendStatus(MSG_STATUS_READY);
|
||||
break;
|
||||
|
||||
default:
|
||||
DEBUG_LN("[MQTT] Unknown command");
|
||||
break;
|
||||
}
|
||||
}
|
||||
|
||||
void mqttConnect() {
|
||||
DEBUG_F("[MQTT] (Re)connecting to server on %s...\n", MQTT_SERVER_ADDR);
|
||||
|
||||
for (int i = 0; !mqttClient.connected(); i++) {
|
||||
// Если не получилось за 5 попыток - перезагружаемся
|
||||
if (i >= 5) {
|
||||
ESP.restart();
|
||||
return;
|
||||
}
|
||||
|
||||
if (!mqttClient.connect(MQTT_CLIENT_ID, MQTT_USER_NAME, MQTT_USER_PASSWORD, MQTT_TOPIC_STATUS, 0, 1, MSG_STATUS_LAST_WILL)) {
|
||||
// Ждем 2 секунды
|
||||
DEBUG_F(".");
|
||||
ledBlink(PIN_LED_GREEN, 8);
|
||||
}
|
||||
}
|
||||
|
||||
DEBUG_LN("\n[MQTT] Done");
|
||||
mqttSendStatus(MSG_STATUS_READY);
|
||||
mqttClient.subscribe(MQTT_TOPIC_IN);
|
||||
|
||||
setStateIdle();
|
||||
DEBUG_LN("[MQTT] Current state: IDLE");
|
||||
}
|
||||
|
||||
void mqttStop() {
|
||||
mqttClient.disconnect();
|
||||
ledOff();
|
||||
}
|
||||
|
||||
void mqttSetup() {
|
||||
mqttClient.setServer(MQTT_SERVER_ADDR, MQTT_SERVER_PORT);
|
||||
mqttClient.setCallback(onMqttMsgReceived);
|
||||
mqttConnect();
|
||||
}
|
||||
|
||||
void mqttLoop() {
|
||||
if (!mqttClient.connected()) {
|
||||
mqttConnect();
|
||||
}
|
||||
mqttClient.loop();
|
||||
}
|
||||
58
native/src/ota.ino
Normal file
58
native/src/ota.ino
Normal file
@@ -0,0 +1,58 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
void otaSetup() {
|
||||
ArduinoOTA.setHostname(HOST_NAME);
|
||||
ArduinoOTA.setPort(OTA_PORT);
|
||||
|
||||
ArduinoOTA.setPassword(HOST_PASSWORD);
|
||||
|
||||
ArduinoOTA.onStart([]() {
|
||||
DEBUG_LN("[OTA] Start update");
|
||||
webServerStop();
|
||||
mqttStop();
|
||||
});
|
||||
|
||||
ArduinoOTA.onEnd([]() {
|
||||
DEBUG_LN("[OTA] End update");
|
||||
});
|
||||
|
||||
ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) {
|
||||
DEBUG_F("[OTA] Progress: %u%%\n", (progress / (total / 100)));
|
||||
});
|
||||
|
||||
ArduinoOTA.onError([](ota_error_t error) {
|
||||
String type;
|
||||
switch (error) {
|
||||
// "Ошибка при аутентификации"
|
||||
case OTA_AUTH_ERROR:
|
||||
type = "Auth Failed";
|
||||
break;
|
||||
// "Ошибка при начале OTA-апдейта"
|
||||
case OTA_BEGIN_ERROR:
|
||||
type = "Begin Failed";
|
||||
break;
|
||||
// "Ошибка при подключении"
|
||||
case OTA_CONNECT_ERROR:
|
||||
type = "Connect Failed";
|
||||
break;
|
||||
// "Ошибка при получении данных"
|
||||
case OTA_RECEIVE_ERROR:
|
||||
type = "Receive Failed";
|
||||
break;
|
||||
// "Ошибка при завершении OTA-апдейта"
|
||||
case OTA_END_ERROR:
|
||||
type = "End Failed";
|
||||
break;
|
||||
default:
|
||||
type = "Unknown";
|
||||
}
|
||||
|
||||
DEBUG_F("[OTA] Error[%u]: %s\n", error, type.c_str());
|
||||
});
|
||||
|
||||
ArduinoOTA.begin();
|
||||
}
|
||||
|
||||
void otaLoop() {
|
||||
ArduinoOTA.handle();
|
||||
}
|
||||
72
native/src/server.ino
Normal file
72
native/src/server.ino
Normal file
@@ -0,0 +1,72 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
AsyncWebServer _server(80);
|
||||
AsyncWebSocket _ws("/ws");
|
||||
|
||||
AsyncWebSocket webSocket() {
|
||||
return _ws;
|
||||
}
|
||||
|
||||
void _wsEvent(AsyncWebSocket * server, AsyncWebSocketClient * client, AwsEventType type, void * arg, uint8_t *data, size_t len) {
|
||||
uint32_t id = client->id();
|
||||
|
||||
switch (type) {
|
||||
case WS_EVT_CONNECT:
|
||||
DEBUG_F("[WS] Client connected - ID: %u\n", id);
|
||||
client->ping();
|
||||
break;
|
||||
|
||||
case WS_EVT_DISCONNECT:
|
||||
DEBUG_F("[WS] Client disconnected - ID: %u\n", id);
|
||||
break;
|
||||
|
||||
case WS_EVT_ERROR:
|
||||
DEBUG_F("[WS] Error - ID: %u, code: %u, error: %s\n", id, *((uint16_t*)arg), (char*)data);
|
||||
break;
|
||||
|
||||
case WS_EVT_PONG:
|
||||
DEBUG_F("[WS] Pong - ID: %u\n", id);
|
||||
break;
|
||||
|
||||
case WS_EVT_DATA:
|
||||
AwsFrameInfo * info = (AwsFrameInfo*)arg;
|
||||
if (info->final && info->index == 0 && info->len == len) {
|
||||
if (info->opcode == WS_TEXT) {
|
||||
DEBUG_F("[WS] Message received - ID: %u, message: %s\n", id, (char*)data);
|
||||
} else {
|
||||
DEBUG_F("[WS] Bynary messages not supported - ID: %u\n", id);
|
||||
}
|
||||
} else if (info->final && (info->index + len) == info->len) {
|
||||
DEBUG_F("[WS] Message too long - ID: %u\n", id);
|
||||
}
|
||||
break;
|
||||
}
|
||||
}
|
||||
|
||||
void webServerStop() {
|
||||
DEBUG_LN("[WS] Server stopped");
|
||||
SPIFFS.end();
|
||||
_ws.enable(false);
|
||||
_ws.closeAll(1012);
|
||||
}
|
||||
|
||||
void webServerSetup() {
|
||||
SPIFFS.begin();
|
||||
|
||||
_server.rewrite("/", "/index.html");
|
||||
_server.onNotFound([](AsyncWebServerRequest *request) {
|
||||
request->send(404, "text/plain", "404: Not Found");
|
||||
});
|
||||
_server.on("/restart", HTTP_POST, [](AsyncWebServerRequest *request) {
|
||||
request->send(200);
|
||||
DEBUG_LN("Restarting...");
|
||||
webServerStop();
|
||||
mqttStop();
|
||||
deferredRestart(200);
|
||||
});
|
||||
_server.serveStatic("/", SPIFFS, "/");
|
||||
_server.begin();
|
||||
|
||||
_ws.onEvent(_wsEvent);
|
||||
_server.addHandler(&_ws);
|
||||
}
|
||||
44
native/src/wifi.ino
Normal file
44
native/src/wifi.ino
Normal file
@@ -0,0 +1,44 @@
|
||||
#include "inc/include.h"
|
||||
|
||||
void wifiDisconnect() {
|
||||
WiFi.disconnect();
|
||||
ledOff();
|
||||
}
|
||||
|
||||
void wifiConnect() {
|
||||
DEBUG_F("[WIFI] (Re)connecting to \"%s\"\n", WIFI_SSID);
|
||||
|
||||
WiFi.mode(WIFI_STA);
|
||||
WiFi.hostname(HOST_NAME);
|
||||
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
|
||||
|
||||
for (int i = 0; WiFi.status() != WL_CONNECTED; i++) {
|
||||
// Если не получилось за 5 попыток - перезагружаемся
|
||||
if (i >= 5) {
|
||||
ESP.restart();
|
||||
return;
|
||||
}
|
||||
|
||||
// Ждем 2 секунды
|
||||
DEBUG_F(".");
|
||||
ledBlink(PIN_LED_BLUE, 8);
|
||||
}
|
||||
|
||||
DEBUG_LN("\n[WIFI] Done");
|
||||
DEBUG_F("[WIFI] IP address: %s\n", WiFi.localIP().toString().c_str());
|
||||
}
|
||||
|
||||
void wifiReconnect() {
|
||||
wifiDisconnect();
|
||||
wifiConnect();
|
||||
}
|
||||
|
||||
void wifiSetup() {
|
||||
wifiConnect();
|
||||
}
|
||||
|
||||
void wifiLoop() {
|
||||
if (WiFi.status() != WL_CONNECTED) {
|
||||
wifiReconnect();
|
||||
}
|
||||
}
|
||||
Reference in New Issue
Block a user